1、侧方交会的定义如图所示,A、B为已知控制点,P为待定点。自一个已知坐标之三角点(可记为点A), 与欲求点上(可记为P点),观测另一已知坐标三角点(B点)之水平角,以推算欲求点之坐标位置,称之为侧方交会法。
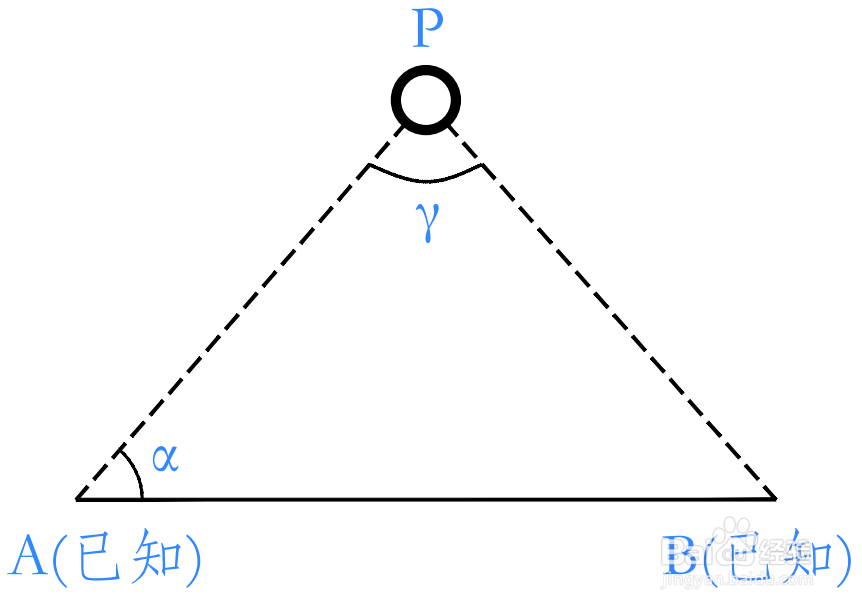
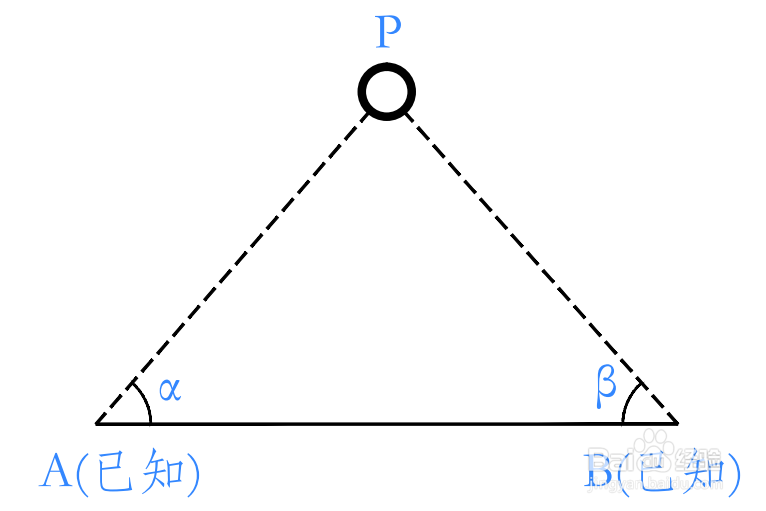
2、计算步骤1——根据三角形内角和为180°,得到B点的角度β=180°-α-γ
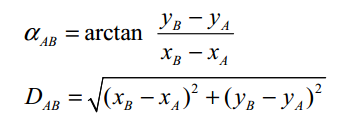
3、计算步骤2——之后,就可以套用前方交会的公式,进行P点坐标计算。根据已知坐标计算已知边AB的方位角和边长。公式如图所示。
4、计算步骤3——推算AP和BP边的坐标方位角。公式如图所示。

5、计算步骤4——分别由A点和B点计算P点坐标。公式如图所示。

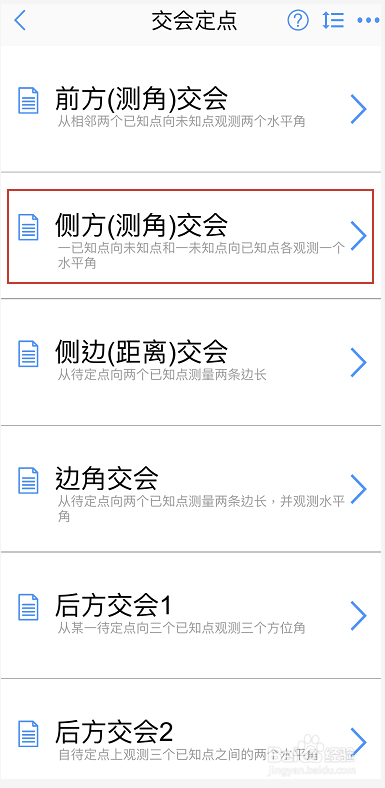
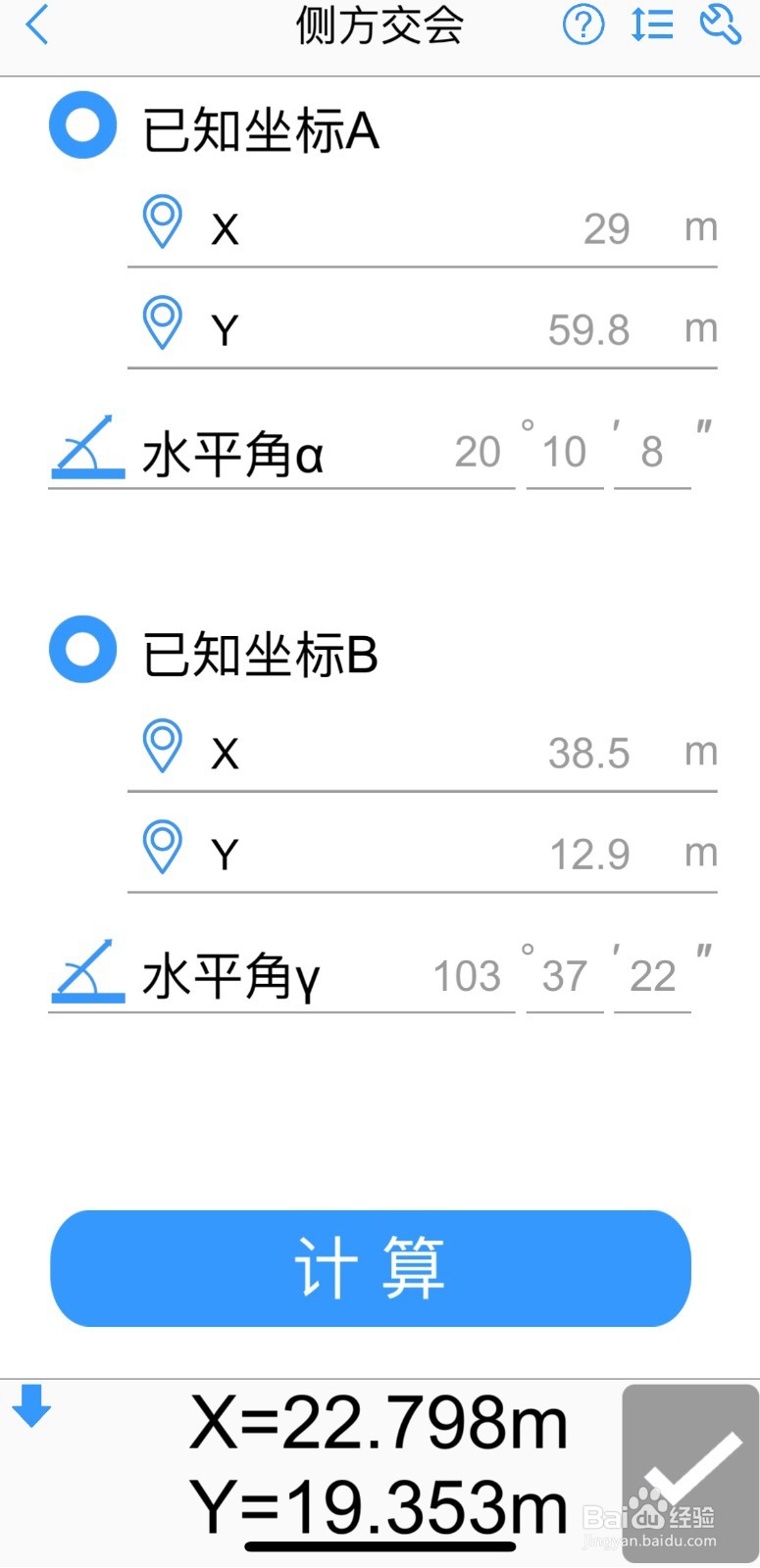
6、我们可以借助趁手的软件计算测角交会。打开《工程测量大师》App,依次进入交会定点——侧方(测角)交会。
7、输入观测到的数据,直接利用《工程测量大师》进行侧方交会的计算。注意:输入的A、B、P的点号须按逆时针的次序排列。
8、《工程测量大师》其他功能《工程测量大师》App是一款供测量人员使用的软件,包含了坐标正反算、水准计算、控制测量导线平差、交会定点等众多功能。同时还可以保存数据,记录下您的计算结果。

