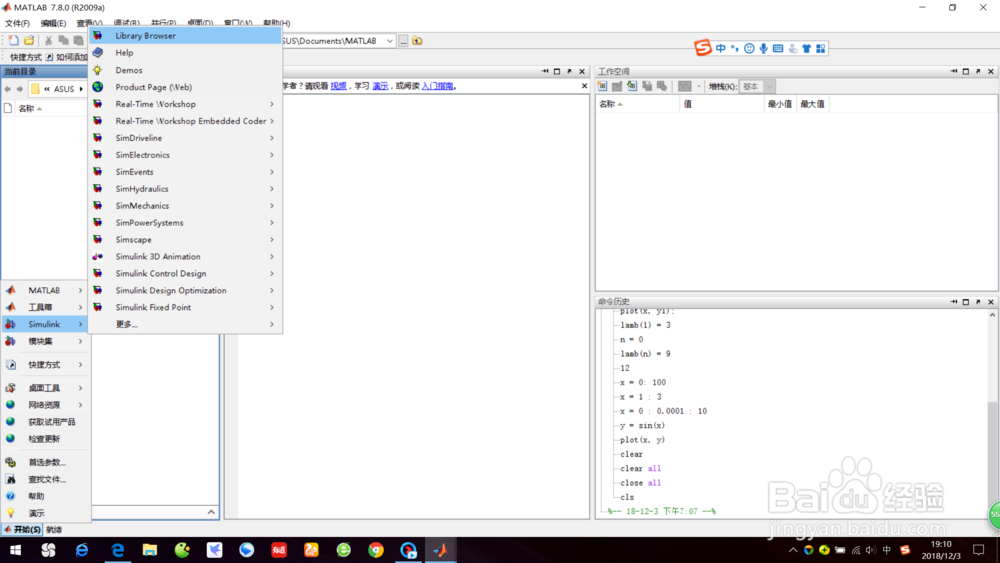
1、打开matlab2009,新建一个模型文件,点击“开始”->"Simulink"->“Library Browser”,打开simulink库。

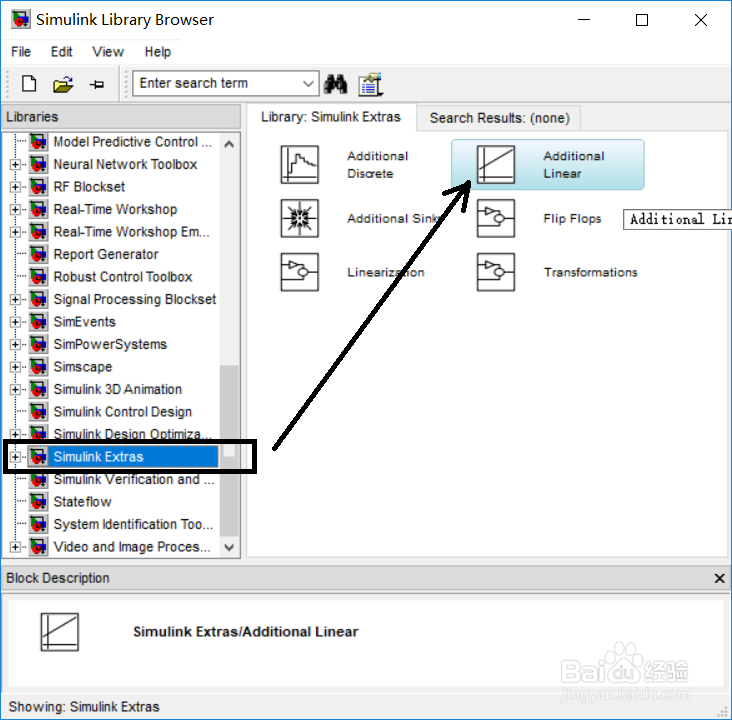
2、在“Simulink Library Browser”的库列表中找到“Simulink Extras”,点击右侧的“Additional Linear”。
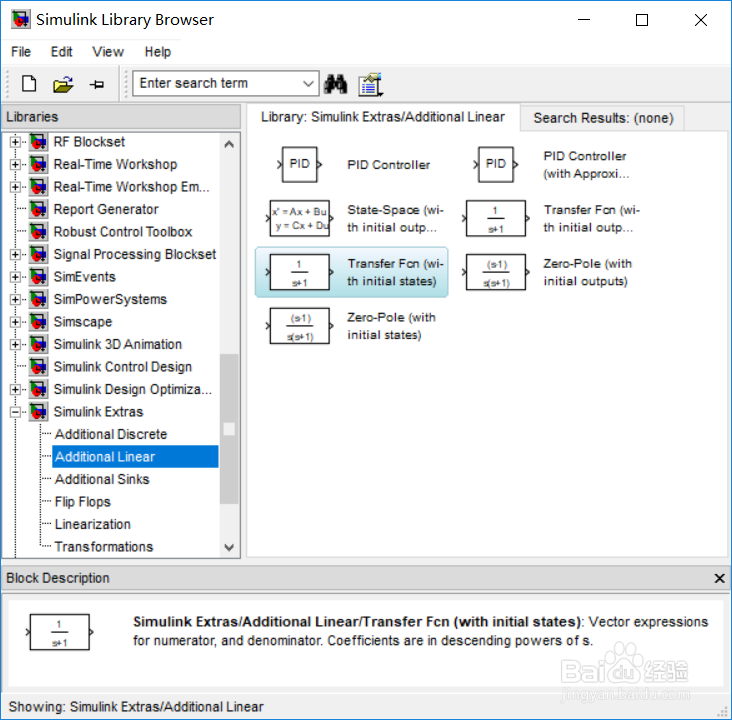
3、将Additional Linear的“PID Controller”和“TransferFon”添加到模型编辑区域。

4、在“Simulink Library Browser”库列表中找到“Simulink”->“Commonly Used Blocks”,将Scope和Sum模型添加到编辑区域。

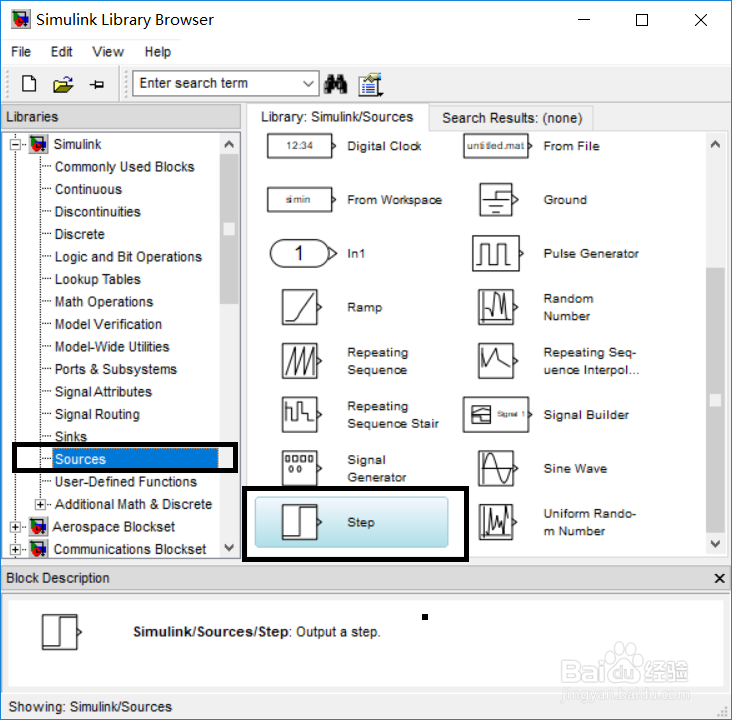
5、在“Simulink”->“Sources”找到Step模型,这是一个阶跃信号发生器。
6、将所有模型按图中方式连接,注意只有连接的线是实心黑线才表示连接成功,如果是红色的虚线,那么最粗暴的方式是删掉它重新连。

7、这里的sum反馈的符号是一个+,也就是说这是一个正反馈,但是我们pid一般都是负反馈,所以需要改一下反馈的符号。双击sum切换到sum的属性对话框,将List of signs由++改为--,则下面的+会变成减。

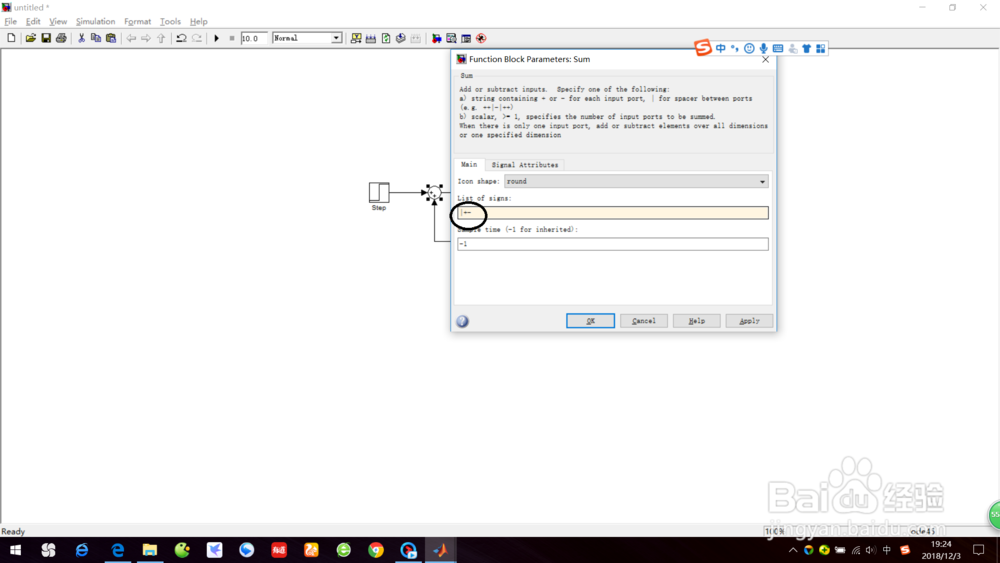
8、sum的下面的符号变成了-,反馈回来的信号相减,系统变成负反馈。

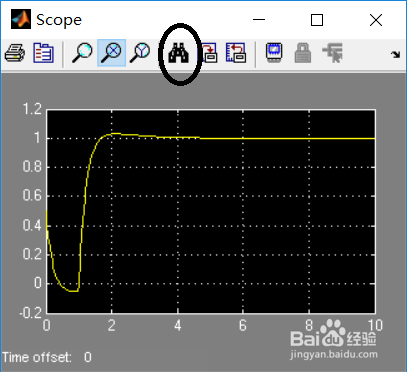
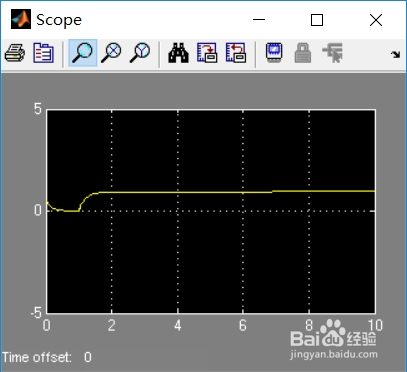
9、点击执行按钮,然后双击Scope,切换到显示界面,出现熟悉的pid输出波形。
10、双击pid控件可以调整PID的三个基本参数,Proportional(比例常数),Integral(积分常数),Derivative(微分常数)。

11、我们试试将积分常数改为100,然后再次运行,在Scope中点击“Autoscale”,可以看到输出由平滑变得震荡起来了。


12、可以试着自己调整下PID的各个参数,看看效果,加深理解。